
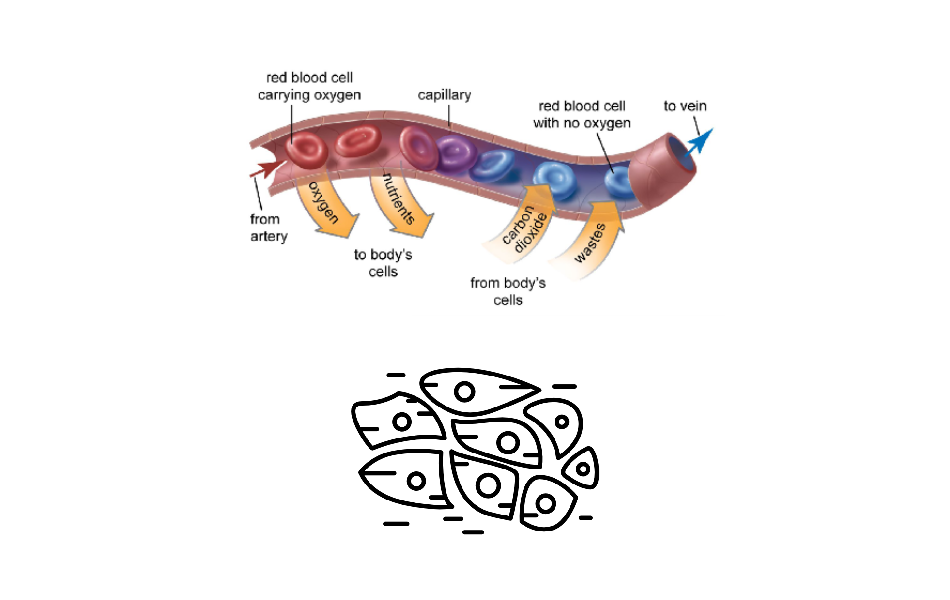
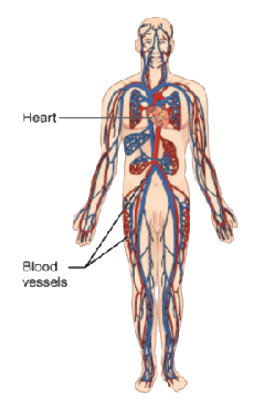
循环系统由心脏、血液和血管组成,负责将营养物质输送到身体的细胞。营养物质通过红细胞输送到体内。消化系统由胃、肠等组成,负责输送人体活动所需的能量,并将废物排出体外。
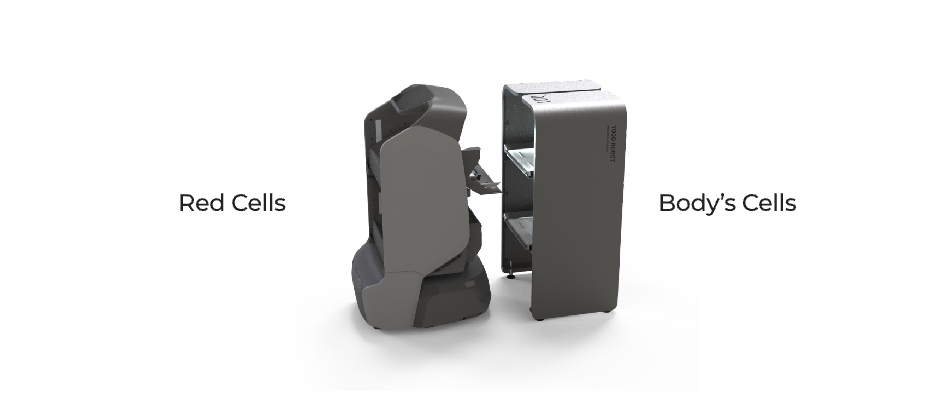
在认知空间中,机器人就像红细胞一样,在电梯或走廊中搬运和运送货物和资源,以满足人类的需求。与此同时,机器人还通过大楼外的垃圾电梯和走廊运送垃圾。
心脏 →控制中枢
血管 → 物资电梯/走廊
红细胞 → 机器人
营养 → 能量
胃 → 能量管理系统
大肠 → 废物电梯/走廊
Delivers Oxygen And Nutrients To Tissues Equalizes Temperature Inthe Body
心脏 → 控制中枢
血管 → 物资电梯/走廊
红细胞 → 机器人
心血管系统(又称循环系统)是基础设施网络,负责整个建筑中重要资源和信息的循环。该系统确保重要元素得到有效分配和管理。
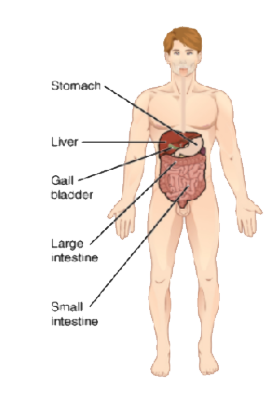
Processes Food Foruse By The Body Removes Wastesfrom Undigested Food
营养 → 能量
胃 → 能量管理系统
大肠 → 废物电梯/走廊
认知空间的消化系统会不断地将电力转化为人类活动所需的运动,并通过肠道将废物排出体外。


为保证调度策略执行到位,须培训电梯员,并在电梯内张贴调度策略快速说明
全局最优建议:机器人直接自主决策货梯
共8台机器人, 分为两组, 每4台一组, 同组机器人总是同在电梯里
电梯满载4台机器人,每到一层就放下一台机器人
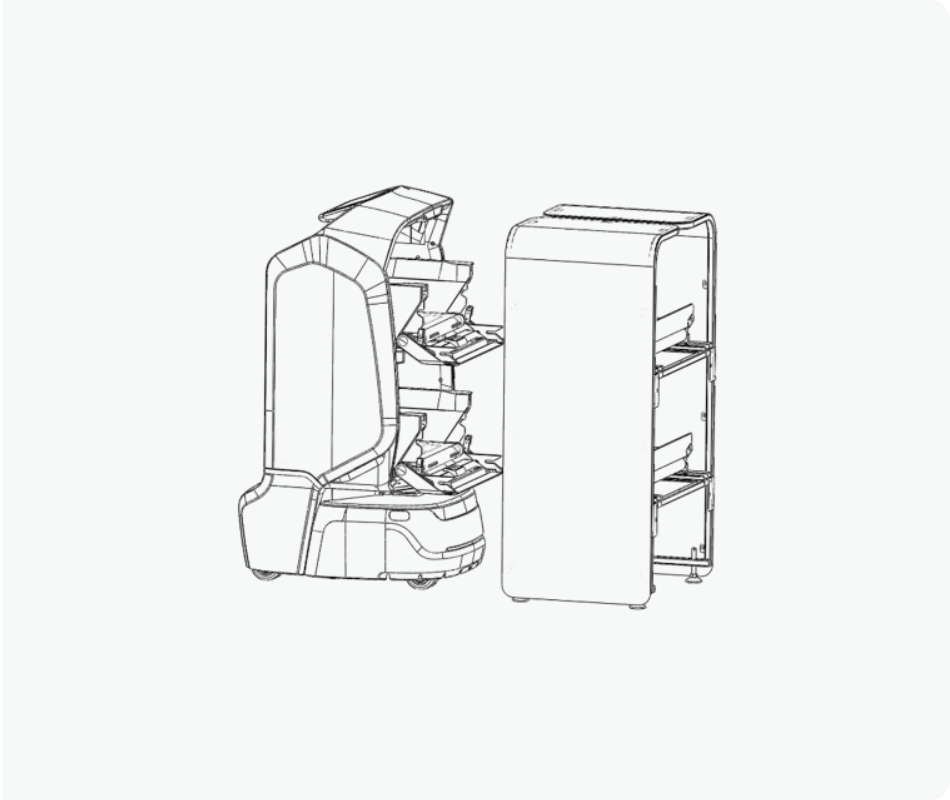
机器人到达货架对接点后,机器人通讯给取送分离模块打开带有对接机构的门,机器人识别货架上的反光条通过导航运动进行机器人和货架的前后,左右方向的对齐,并且通过取送分离模块和货架的自适应对接机构实现高度,前后方向的定位对齐,对齐完成后通过机器人取送分离模块上的传感器检测货架的对接杆实现整个对接运动的闭环控制,通过整个软硬一体的对接方案,使得机器人和货架的对接能稳定、高效的完成,并且自适应的对接机构让机器人和货架的对接能具有很好的地面适应能力。
货架端的传送带的动力是通过机器人和货架对接端的强力轮来实现的,为非接触的动力传输,极大的降低了传动机构的要求以及增加了整个动力传输的可靠性和适应场景环境范围。
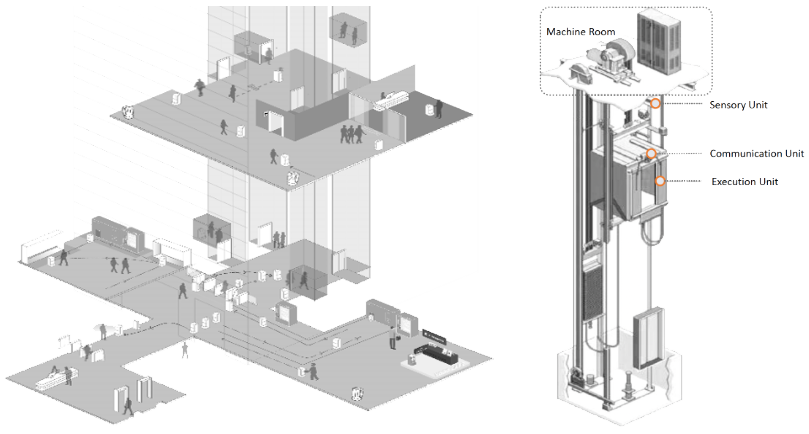
无侵入式安装:兼容98%的电梯
全面感知、实时监控
支持多台电梯、机器人、闸机之间的广泛操作
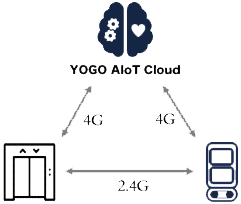
自主研发双通讯4G+2.4G:克服云到云解决方案中的延迟和弱网络问题
YOGO系统包含两个通信通道:4G和2.4G 可确保稳定且不间断的通信,从而显着提高技术的质量和可靠性。
YOGO专有的Ad-Hoc网络技术 允许网络内的设备直接相互通信。这种方法提高了通信效率,特别是在传统网络基础设施可能缺乏或过载的环境中。
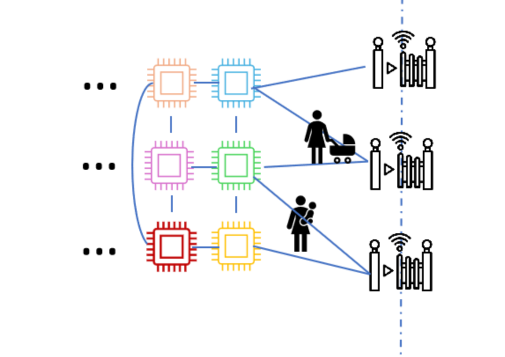
借助mesh网络,机器人可以像人类一样排队、避开障碍物甚至挤进电梯。
Mesh网络集群将始终共享所有信息,因为所有设备和机器人实际上都是同一个大脑的一部分。
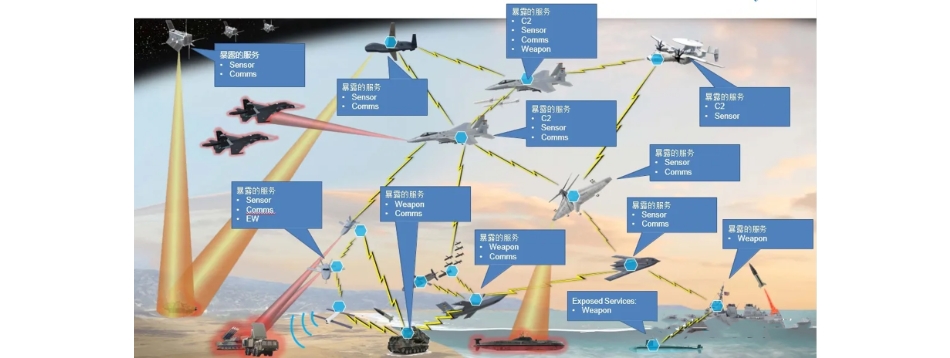
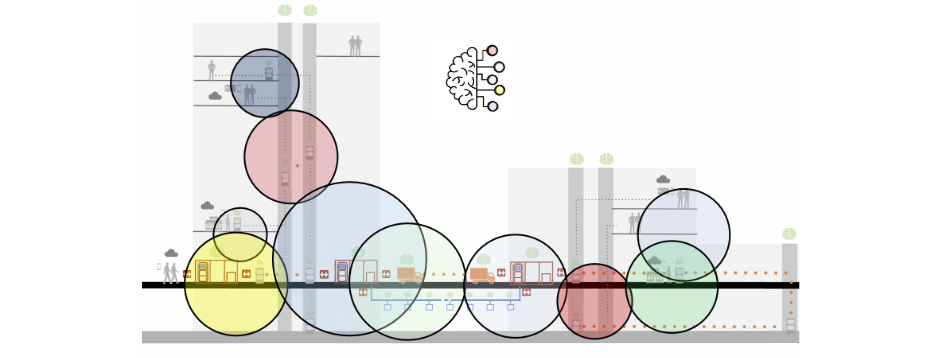
不再是单个系统通过自己狭隘的视角来观察战斗空间,而是存在一个可以随时看到整个战斗空间的网络。当作战武器识别出相关信息时,无论各个系统位于何处,它都能够立即在整个网络中共享该信息。
指挥官不再将作战武器视为飞机、潜艇、坦克,也不太关心这些机器是在海上、陆地、空中、太空还是网络空间运行。他唯一的目标就是完成任务。
当机器人识别出相关信息时,无论各个系统位于何处, 它将能够立即在整个Mesh网络集群中共享信息。







